Unterwasser-Roboter
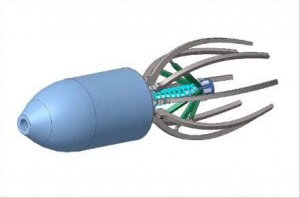
Pittsburgh (pte019/22.04.2020/12:15) – Forscher der Carnegie Mellon University (CMU) http://cmu.edu haben mit „PATRICK“ einen autonomen Unterwasser-Roboter entwickelt, dessen äußere Erscheinung und Verhalten dem natürlichen Vorbild von Schlangensternen ähnelt. Er besteht aus wasserdichtem weichem Silikon und speziellen Formgedächtnislegierungen, die ihm eine flexible Bewegung auch in schwierigem Terrain ermöglichen, um selbständig unterschiedliche Missionen zu erledigen.
Muskeln statt Motoren
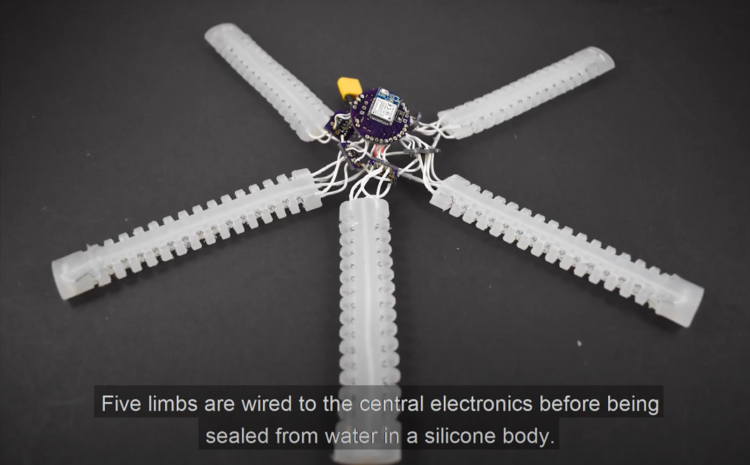
„Dieses Gerät ist eine natürliche Erweiterung unserer bisherigen Arbeit, die darauf abzielt, weiche, nicht kabelgebundene Roboter herzustellen, die anstelle von elektrischen Motoren Muskelstränge zur Fortbewegung verwenden“, zitiert „TechXplore“ Zach Patterson, Projektleiter am Soft Machines Lab der CMU. Diese Muskeln habe man bei PATRICK in Form von Formgedächtnislegierungen realisiert, die sich in seinen fünf Gliedmaßen verstecken. „Die Eigenschaften dieser speziellen Metalle ermöglichen es dem Roboter, seine Beine zu dehnen und in die gewünschte Richtung auszustrecken“, erläutert der Experte.
Zusätzlich zu seiner großen Flexibilität hat PATRICK noch einen weiteren Vorteil: Er kommt völlig ohne Kabelverbindung aus und kann sich dennoch autonom und zielsicher in seiner Umgebung zurechtfinden. Um das zu bewerkstelligen, haben seine Erfinder ein eigenes Framework kreiert, über das der künstliche Unterwasserforscher kabellos mit verschiedenen Geräten an Land kommuniziert. „Das gibt ihm besondere Fähigkeiten, die weit über das hinausgehen, was seine relativ günstigen sonstigen Hardware-Komponenten leisten können. Dadurch kann er seine Umgebung selber wahrnehmen“, so Patterson.
Erfolgreiche Praxistests
Bei ersten Praxistests hat sich das innovative Design von PATRICK bereits sehr gut bewährt, wie der Wissenschaftler berichtet: „Wir konnten demonstrieren, dass sich unser Roboter in Echtzeit zu seinem Ziel bewegen kann – das ist eine Premiere im Bereich von kabellosen, weichen Robotern.“ Das habe auch dann sehr gut geklappt, als sich das Gerät in äußerst schwierigem Gelände bewegen musste.
Aufgrund der positiven Testergebnisse sind Patterson und sein Team zuversichtlich, dass ihre Entwicklung künftig in vielen verschiedenen Bereichen eine praktische Anwendbarkeit finden wird. Genannt werden beispielsweise Einsätze für geologische und biologische Erkundungsmissionen, bei denen es wichtig ist, möglichst wenig Schaden in der sensiblen Unterwasserwelt anzurichten. „Wir hoffen aber auch, dadurch die Mechanismen der Fortbewegung von Schlangensternen besser zu verstehen“, ergänzt der Wissenschaftler.
Related post